引言
AUTOSAR(汽車(chē)開(kāi)放系統(tǒng)架構(gòu))旨在為汽車(chē)電子控制單元(ECU)提供一個(gè)標(biāo)準(zhǔn)化的、開(kāi)放的軟件架構(gòu),以提高軟件的可重用性、可擴(kuò)展性和可維護(hù)性。在AUTOSAR的分層架構(gòu)中,微控制器抽象層(MCAL)位于基礎(chǔ)軟件(BSW)的最底層,是連接上層軟件與底層硬件的橋梁。理解MCAL的架構(gòu)及其提供的基礎(chǔ)軟件服務(wù),是進(jìn)行AUTOSAR車(chē)載軟件開(kāi)發(fā)的基礎(chǔ)。
一、AUTOSAR MCAL軟件架構(gòu)基本概念
MCAL(Microcontroller Abstraction Layer)的核心目標(biāo)是將上層軟件(如服務(wù)層、復(fù)雜驅(qū)動(dòng)等)與具體的微控制器硬件細(xì)節(jié)進(jìn)行解耦。它通過(guò)提供標(biāo)準(zhǔn)化的API接口,使得上層軟件無(wú)需關(guān)心底層硬件的具體實(shí)現(xiàn),從而實(shí)現(xiàn)了軟件的可移植性。
1. 分層架構(gòu)中的定位:
MCAL位于AUTOSAR分層架構(gòu)的底部,直接與微控制器的內(nèi)部外設(shè)(如ADC、DIO、PWM、CAN、SPI等)和內(nèi)存映射寄存器進(jìn)行交互。它為上一層——ECU抽象層(ECUAL)——提供標(biāo)準(zhǔn)化的、與硬件無(wú)關(guān)的驅(qū)動(dòng)服務(wù)接口。
2. 模塊化設(shè)計(jì):
MCAL本身不是一個(gè)單一的模塊,而是由一系列獨(dú)立的、針對(duì)特定微控制器外設(shè)的驅(qū)動(dòng)模塊組成。常見(jiàn)的MCAL模塊包括:
- 微控制器驅(qū)動(dòng)(MCU Driver):負(fù)責(zé)初始化、時(shí)鐘設(shè)置、電源管理以及低功耗模式控制。
- 通用輸入/輸出驅(qū)動(dòng)(DIO Driver):控制數(shù)字輸入/輸出引腳。
- 模數(shù)轉(zhuǎn)換驅(qū)動(dòng)(ADC Driver):控制ADC模塊進(jìn)行模擬信號(hào)采樣。
- 脈寬調(diào)制驅(qū)動(dòng)(PWM Driver):生成PWM信號(hào)。
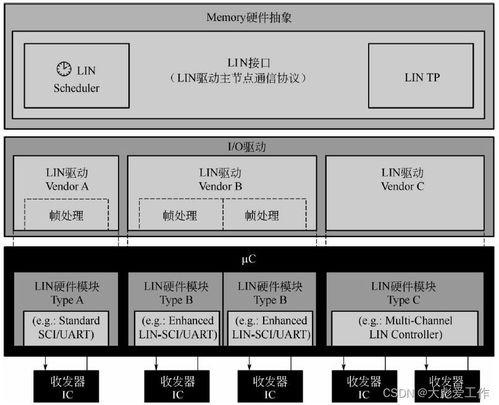
- 通信驅(qū)動(dòng):如CAN Driver、LIN Driver、SPI Driver、以太網(wǎng)驅(qū)動(dòng)等,負(fù)責(zé)對(duì)應(yīng)總線(xiàn)的數(shù)據(jù)收發(fā)控制。
- 存儲(chǔ)驅(qū)動(dòng):如EEPROM Driver、Flash Driver,負(fù)責(zé)非易失性存儲(chǔ)器的讀寫(xiě)操作。
- 看門(mén)狗驅(qū)動(dòng)(WDT Driver):管理系統(tǒng)看門(mén)狗定時(shí)器。
3. 硬件抽象與配置:
每個(gè)MCAL驅(qū)動(dòng)都通過(guò)一組標(biāo)準(zhǔn)化的API(如Dio<em>WriteChannel, Adc</em>StartGroupConversion)向上層提供服務(wù)。驅(qū)動(dòng)的具體行為(如引腳映射、時(shí)鐘頻率、中斷優(yōu)先級(jí)等)完全由配置參數(shù)決定,這些參數(shù)通過(guò)AUTOSAR配置工具(如EB tresos, DaVinci Configurator)生成,并最終編譯鏈接到可執(zhí)行代碼中。這種設(shè)計(jì)使得同一套上層應(yīng)用代碼,只需更換MCAL配置和驅(qū)動(dòng)實(shí)現(xiàn),即可適配不同的微控制器。
二、MCAL提供的基礎(chǔ)軟件服務(wù)
MCAL作為基礎(chǔ)軟件的核心組成部分,向上層提供了以下幾類(lèi)關(guān)鍵的基礎(chǔ)服務(wù):
1. 初始化與時(shí)鐘管理服務(wù):
主要由MCU Driver提供。在ECU上電后,首先執(zhí)行MCAL的初始化序列,包括配置微控制器的內(nèi)核時(shí)鐘、外設(shè)時(shí)鐘、鎖相環(huán)(PLL)以及初始化內(nèi)存保護(hù)單元(MPU)等。這些服務(wù)為整個(gè)軟件系統(tǒng)的穩(wěn)定運(yùn)行奠定了基礎(chǔ)。
- 數(shù)字與模擬I/O服務(wù):
- DIO Driver:提供讀取/設(shè)置單個(gè)或多個(gè)數(shù)字引腳電平的功能。
- Port Driver:配置每個(gè)I/O引腳的功能(如通用I/O、專(zhuān)用外設(shè)功能)、驅(qū)動(dòng)強(qiáng)度、上下拉電阻等。
- ADC Driver:提供啟動(dòng)轉(zhuǎn)換、讀取轉(zhuǎn)換結(jié)果、配置采樣通道和組、支持查詢(xún)和中斷兩種方式獲取結(jié)果等服務(wù)。
- PWM Driver:提供設(shè)置占空比、周期、極性等參數(shù)以生成精確的PWM波形。
3. 通信服務(wù):
這是MCAL中非常關(guān)鍵的一類(lèi)服務(wù),實(shí)現(xiàn)了車(chē)輛內(nèi)部網(wǎng)絡(luò)通信的底層硬件控制。
- CAN Driver:負(fù)責(zé)CAN控制器的初始化、報(bào)文的發(fā)送(
Can_Write)和接收(通常通過(guò)配置的中斷或輪詢(xún)模式)、波特率設(shè)置、硬件過(guò)濾器配置等。它不涉及高層協(xié)議(如CAN Transport Layer, CAN Network Management),僅處理物理層和數(shù)據(jù)鏈路層的硬件操作。
- 其他通信驅(qū)動(dòng)(LIN, SPI, Ethernet MAC等)提供類(lèi)似的基礎(chǔ)收發(fā)與控制服務(wù)。
- 存儲(chǔ)服務(wù):
- Flash Driver:提供對(duì)內(nèi)部Flash存儲(chǔ)器的擦除、寫(xiě)入和讀取服務(wù),通常用于存儲(chǔ)應(yīng)用程序代碼或校準(zhǔn)數(shù)據(jù)。它實(shí)現(xiàn)了復(fù)雜的擦寫(xiě)序列和狀態(tài)機(jī),確保操作的可靠性和對(duì)硬件的保護(hù)。
- EEPROM Driver:提供對(duì)EEPROM(內(nèi)部或外部)的讀寫(xiě)服務(wù),通常用于存儲(chǔ)需要頻繁修改且斷電保存的數(shù)據(jù),如故障碼、里程信息等。
- 定時(shí)與監(jiān)控服務(wù):
- GPT Driver(通用定時(shí)器驅(qū)動(dòng)):提供精確的定時(shí)和延時(shí)功能,可以配置為單次或連續(xù)模式,并產(chǎn)生中斷。
- WDT Driver:提供對(duì)硬件看門(mén)狗定時(shí)器的初始化和“喂狗”服務(wù),是確保系統(tǒng)在軟件跑飛或死鎖時(shí)能夠自動(dòng)復(fù)位恢復(fù)的關(guān)鍵安全機(jī)制。
6. 中斷處理服務(wù):
雖然中斷向量表的管理通常由MCU Driver或操作系統(tǒng)處理,但MCAL中的許多驅(qū)動(dòng)(如ADC, CAN, GPT)都依賴(lài)于硬件中斷來(lái)實(shí)現(xiàn)高效的事件驅(qū)動(dòng)操作。MCAL負(fù)責(zé)在驅(qū)動(dòng)初始化時(shí)配置相關(guān)外設(shè)的中斷使能和優(yōu)先級(jí),并提供中斷服務(wù)例程(ISR)的框架。
三、
AUTOSAR MCAL通過(guò)其高度模塊化和標(biāo)準(zhǔn)化的設(shè)計(jì),成功地將汽車(chē)ECU軟件與底層硬件解耦。它提供的一系列基礎(chǔ)軟件服務(wù)——涵蓋I/O控制、通信、存儲(chǔ)、定時(shí)與安全監(jiān)控——構(gòu)成了整個(gè)AUTOSAR軟件棧運(yùn)行的硬件基石。對(duì)于開(kāi)發(fā)者而言,掌握MCAL的架構(gòu)概念和各驅(qū)動(dòng)的服務(wù)接口,是進(jìn)行ECU底層配置、驅(qū)動(dòng)開(kāi)發(fā)以及系統(tǒng)集成與調(diào)試的關(guān)鍵。隨著汽車(chē)電子電氣架構(gòu)向域控制器和中央計(jì)算平臺(tái)演進(jìn),MCAL作為標(biāo)準(zhǔn)化硬件接口層的價(jià)值將愈發(fā)凸顯,其穩(wěn)定性和效率直接影響到整個(gè)汽車(chē)控制系統(tǒng)的性能與可靠性。